THRSim11
von Harry Broeders
THRSim11 ist eine Open-Source-Softwareentwicklungsumgebung zum Erstellen und Debuggen von Programmen für den Mikrocontroller Texas Instruments MSP430.
Betriebssystem: Windows
Publisher: Harry Broeders
Release-Version : THRSim11 5.30
Antivirus-Check: bestanden
THRSim11 ist eine leistungsstarke Simulationssoftware, die dazu entwickelt wurde, um Benutzern zu helfen, das Verhalten von Robotern und anderen automatisierten Systemen genau zu simulieren. Sie ist dazu konzipiert, dem Benutzer eine umfassende und intuitive Schnittstelle zu bieten, die es unkompliziert macht, komplexe robotische Systeme zu entwerfen und zu analysieren.
THRSim11 bietet eine breite Palette von Funktionen, die es zu einem unschätzbaren Werkzeug für den Entwurf und die Analyse robotischer Systeme machen. Die erste Funktion ist die Fähigkeit, eine virtuelle Umgebung zu generieren, in der das robotische System getestet und bewertet werden kann. Diese virtuelle Umgebung umfasst eine breite Palette von Elementen wie Gelände, Hindernisse und andere Objekte, die zur Simulation potenzieller Szenarien verwendet werden können. Der Benutzer kann auch die Umgebung steuern, um Parameter wie Wetterbedingungen und das Vorhandensein von Gefahren festzulegen. Zusätzlich kann der Benutzer virtuelle Sensoren und Aktuatoren erstellen, die zur Interaktion mit der Umgebung verwendet werden können.
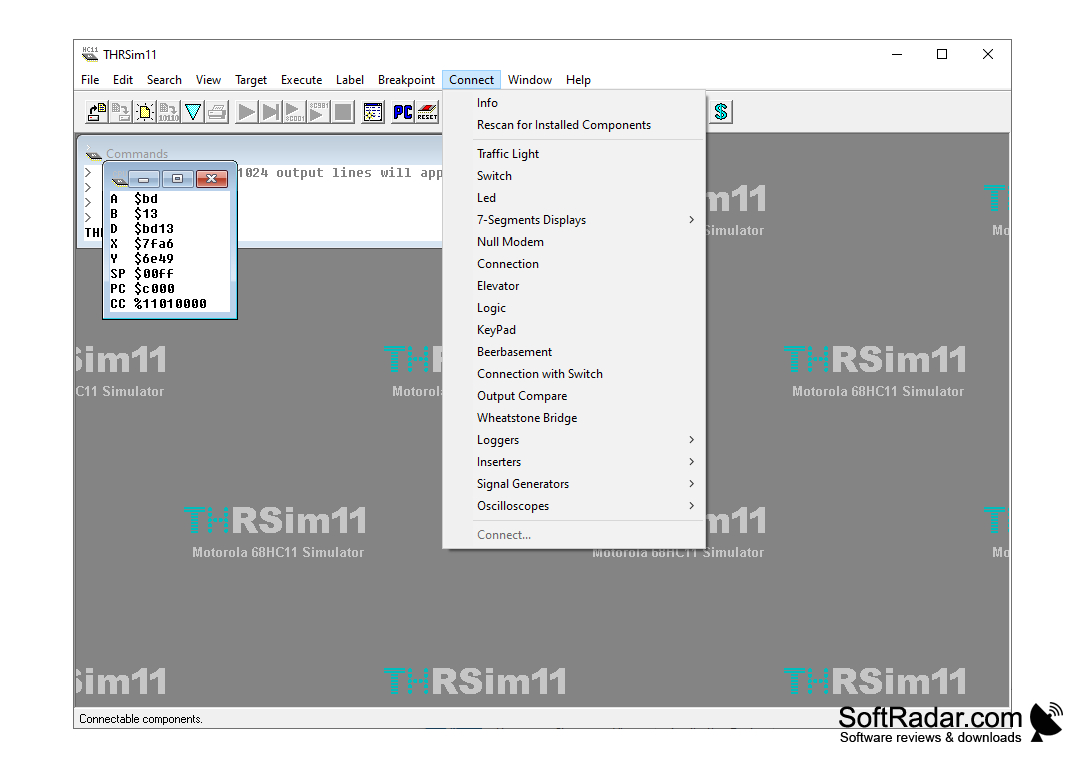
Die zweite Funktion von THRSim11 ist die Fähigkeit, ein robotisches System schnell und genau zu entwerfen. Der Benutzer kann komplexe robotische Systeme mit einer einfachen Drag-and-Drop-Schnittstelle erstellen. Diese Schnittstelle ermöglicht es dem Benutzer, schnell ein robotisches System zu erstellen, indem er einfach die Komponenten auswählt und miteinander verbindet. Das System kann dann unter Verwendung der virtuellen Umgebung getestet und bewertet werden.
Die dritte Funktion von THRSim11 ist die Fähigkeit, die Leistung eines robotischen Systems zu bewerten. Der Benutzer kann die Software verwenden, um die Leistung des Systems zu messen, einschließlich seiner Geschwindigkeit, Genauigkeit und Robustheit. Zusätzlich kann der Benutzer die Software verwenden, um die Energieeffizienz des Systems zu messen, sodass es für verschiedene Aufgaben optimiert werden kann.
Die vierte Funktion von THRSim11 ist die Fähigkeit, die durch das robotische System generierten Daten zu analysieren und zu visualisieren. Der Benutzer kann die Software verwenden, um Diagramme und Grafiken zu erstellen, die ihm helfen, die Leistungsdaten des Systems besser zu verstehen. Zusätzlich kann der Benutzer die vom System generierten Daten nutzen, um Berichte zu erstellen, die verwendet werden können, um die Leistung des Systems zu verbessern.
Schließlich bietet THRSim11 auch eine Reihe von Werkzeugen, die zum Debuggen und zur Fehlersuche des robotischen Systems verwendet werden können. Die Software umfasst eine Reihe von Debugging-Tools, die zur Identifizierung und Behebung von Problemen eingesetzt werden können. Zusätzlich enthält die Software eine Reihe von Diagnosewerkzeugen, die zur Erkennung und Behebung von Problemen im System verwendet werden können.
Insgesamt ist THRSim11 eine leistungsfähige und umfassende Simulationssoftware, die zum Entwerfen, Testen und Analysieren robotischer Systeme verwendet werden kann. Die Software bietet eine breite Palette von Funktionen, die sie zu einem unschätzbaren Werkzeug für den Entwurf und die Analyse robotischer Systeme machen. Zusätzlich enthält die Software eine Reihe von Werkzeugen, die zum Debuggen und zur Fehlersuche des Systems verwendet werden können. Als solches ist THRSim11 ein unverzichtbares Werkzeug für jeden Roboter-Ingenieur.
THRSim11 bietet eine breite Palette von Funktionen, die es zu einem unschätzbaren Werkzeug für den Entwurf und die Analyse robotischer Systeme machen. Die erste Funktion ist die Fähigkeit, eine virtuelle Umgebung zu generieren, in der das robotische System getestet und bewertet werden kann. Diese virtuelle Umgebung umfasst eine breite Palette von Elementen wie Gelände, Hindernisse und andere Objekte, die zur Simulation potenzieller Szenarien verwendet werden können. Der Benutzer kann auch die Umgebung steuern, um Parameter wie Wetterbedingungen und das Vorhandensein von Gefahren festzulegen. Zusätzlich kann der Benutzer virtuelle Sensoren und Aktuatoren erstellen, die zur Interaktion mit der Umgebung verwendet werden können.
Die zweite Funktion von THRSim11 ist die Fähigkeit, ein robotisches System schnell und genau zu entwerfen. Der Benutzer kann komplexe robotische Systeme mit einer einfachen Drag-and-Drop-Schnittstelle erstellen. Diese Schnittstelle ermöglicht es dem Benutzer, schnell ein robotisches System zu erstellen, indem er einfach die Komponenten auswählt und miteinander verbindet. Das System kann dann unter Verwendung der virtuellen Umgebung getestet und bewertet werden.
Die dritte Funktion von THRSim11 ist die Fähigkeit, die Leistung eines robotischen Systems zu bewerten. Der Benutzer kann die Software verwenden, um die Leistung des Systems zu messen, einschließlich seiner Geschwindigkeit, Genauigkeit und Robustheit. Zusätzlich kann der Benutzer die Software verwenden, um die Energieeffizienz des Systems zu messen, sodass es für verschiedene Aufgaben optimiert werden kann.
Die vierte Funktion von THRSim11 ist die Fähigkeit, die durch das robotische System generierten Daten zu analysieren und zu visualisieren. Der Benutzer kann die Software verwenden, um Diagramme und Grafiken zu erstellen, die ihm helfen, die Leistungsdaten des Systems besser zu verstehen. Zusätzlich kann der Benutzer die vom System generierten Daten nutzen, um Berichte zu erstellen, die verwendet werden können, um die Leistung des Systems zu verbessern.
Schließlich bietet THRSim11 auch eine Reihe von Werkzeugen, die zum Debuggen und zur Fehlersuche des robotischen Systems verwendet werden können. Die Software umfasst eine Reihe von Debugging-Tools, die zur Identifizierung und Behebung von Problemen eingesetzt werden können. Zusätzlich enthält die Software eine Reihe von Diagnosewerkzeugen, die zur Erkennung und Behebung von Problemen im System verwendet werden können.
Insgesamt ist THRSim11 eine leistungsfähige und umfassende Simulationssoftware, die zum Entwerfen, Testen und Analysieren robotischer Systeme verwendet werden kann. Die Software bietet eine breite Palette von Funktionen, die sie zu einem unschätzbaren Werkzeug für den Entwurf und die Analyse robotischer Systeme machen. Zusätzlich enthält die Software eine Reihe von Werkzeugen, die zum Debuggen und zur Fehlersuche des Systems verwendet werden können. Als solches ist THRSim11 ein unverzichtbares Werkzeug für jeden Roboter-Ingenieur.
THRSim11 ermöglicht es Benutzern, jeden Texas Instruments MSP430 Mikrocontroller genau zu simulieren und zu debuggen.
THRSim11-Software benötigt einen IBM-PC-kompatiblen Computer mit einem Prozessor der Version 486 oder höher, der unter Windows 95, Windows 98, Windows ME, Windows NT4, Windows 2000 oder Windows XP ausgeführt wird. Es werden mindestens 32 MB RAM benötigt, aber für beste Leistung werden 64 MB oder mehr empfohlen. THRSim11 ist mit allen Video Graphics Adapters (VGA) und Super VGA (SVGA) Display-Adaptern kompatibel. Es erfordert auch eine direkte oder serielle Anschlussverbindung zu einem Thrbot- oder Tamiya-Roboter-Controller.
PROS
Unterstützt vollständige Fehlerbehebung für effektive Problemlösung in 68HC11 Programmen.
Benutzerfreundliche Oberfläche ermöglicht einfache Navigation und Lernen.
Hochgenaue Simulation der Echtzeitfunktion von 68HC11 Mikrocontrollern.
Benutzerfreundliche Oberfläche ermöglicht einfache Navigation und Lernen.
Hochgenaue Simulation der Echtzeitfunktion von 68HC11 Mikrocontrollern.
CONS
Erfordert Kenntnisse der Assemblersprache, um effektiv genutzt werden zu können.
Ältere Benutzeroberfläche, die einer Aktualisierung bedarf.
Begrenzter technischer Support bei Problemlösungen geboten.
Ältere Benutzeroberfläche, die einer Aktualisierung bedarf.
Begrenzter technischer Support bei Problemlösungen geboten.